ノーマルクローズ、ノーマルオープンという言葉を聞いたことはあるでしょうか?
リレー、リミットスイッチ、安全スイッチ等の接点回路には、
- 普段は遮断状態で、スイッチを押すと通電する接点=ノーマルオープン(a接点)と
- 普段は通電していて、スイッチを押すと遮断される接点=ノーマルクローズ(b接点)の
両方をもつ物があります。
「普段通電してて、スイッチを押したら切れる!?そんなの何に使うの?」と思う方も多いでしょう。
今回はそんな不思議なノーマルクローズ=b接点についてお話します。
ズバリ、一番多いケースは「非常停止スイッチ」です。
非常停止スイッチは、スイッチを押すことで動力を根元から遮断したり、各機器の安全回路に繋がっているものです。
機械が予期せぬ動きをした時には、非常停止スイッチを押して、確実に止めることが出来なくてはなりません。
ここで、経年劣化等で非常停止の配線が断線していると仮定しましょう。
ノーマルオープン(a接点)を使っている場合
もし非常停止スイッチにノーマルオープンのa接点を使用しているとどうなるでしょうか?
普段は通電していないので、機械は正常に動きます。
非常停止スイッチを押すと……断線しているせいで安全回路が通電しません。
これでは、いざ危険が迫ったときに機械を止めることができず、最悪死亡事故を招きます。
ノーマルクローズ(b接点)を使っている場合
この場合、通電状態でシステムが動くように設計します。
非常停止スイッチを押すと、電気が遮断され安全回路が働きます。
もし配線が断線している場合も、電気が遮断され安全回路が働きます。
つまり、回路に異常があったときに(人が気付けなくても)安全側に倒れてくれるため、安全が確保できるというわけです。
その他にも、工夫次第でたくさんの使い方ができますが、詳細はまた別回にて。
ノーマルクローズ、ノーマルオープンの性質を知っていると、
安全回路をはじめ、様々なケースで適切な回路を組むことができます。
ぜひ性質を正しく理解し、使いこなしましょう!
PLCを制御するための「ラダー言語」の入門講座。
今回は「運転ステップ方式」の解説をします。(※弊社の造語です)
運転ボタンを一回押したら、あとは全自動で複雑な工程をシーケンシャルにこなしていく……。
自動機システムに一番求められることはコレでしょう。
工程管理には、
- タイマで制御する
- 工程の順番は意識せずセンサやリミットの状態のみで判断する
- 自己保持回路をつかう
など、色々な方法が考えられます。
その中でも
- 自由度が高く、複雑な工程も組めて
- いたずらに自己保持リレーを増やすことなく
- 構造もシンプルに仕上げることができる
そんな方法が弊社の推奨する「運転ステップ方式」です。
百聞は一見に如かず。今回も完成形を掲載します。
完成形の実例
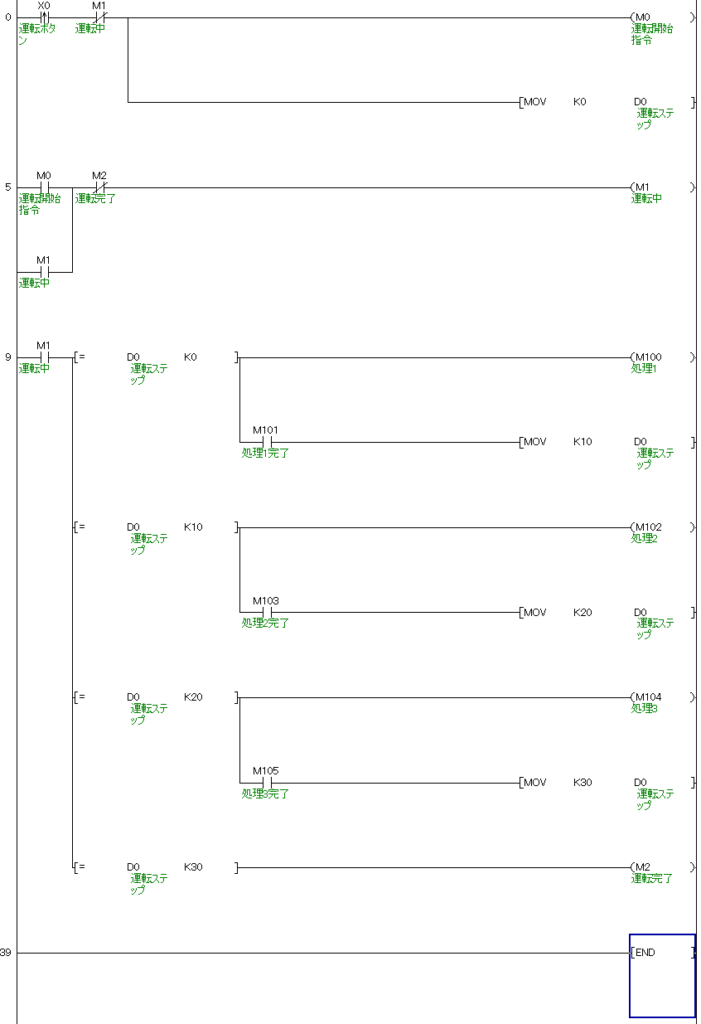
それではポイントを解説していきます。
ポイント1:運転開始はパルスと自己保持を使う
運転ボタンの立ち上がりパルスを使って、1スキャンだけ「運転開始指令」をONにします。
運転開始指令がONになったら「運転中」をONにして自己保持を取り、運転中ステータスを継続させます。
最後に全行程終了した時に「運転完了」によって自己保持を切ることで、運転中を解除できます。
※自己保持回路の解説はこちらの記事で解説しています。
ポイント2:運転ステップ=工程番号
工程を”運転ステップ”と呼ばれる工程番号で管理するというのがポイントです。
- 運転ボタンを押した時に0に初期化して運転開始
- 処理1が終われば運転ステップを10にする
- 処理2が終われば運転ステップを20にする
というように順番に運転ステップをインクリメントしていき、最後まで処理が終われば運転完了信号を出して、運転中ステータスごと落とします。
ここでステップを10ずつ増加させているのは、開発中や運用後の仕様変更によって「既存の工程の間に処理を挟みたい!」という要望が出た時に、手間なく工程を追加できるための一工夫です。
この「運転ステップ方式」を使えば、自己保持用に内部リレーをいくつも消費する事なく、データレジスタ1個で管理できます。
さらにラダーの行数を減らし構造も単純化できるので、可読性の高いメンテナンスしやすいラダーに仕上がります。
みんなで良いラダーを書いて、ラダーマスターになろう!
PLCを制御するための「ラダー言語」の入門講座。
今回は「オルタネイト回路」の解説をします。
- スイッチを一回押したら、モータが動き出す
- もう一度押したら止まる
こういう事をしたいケースは多々あります。
トグルスイッチやオルタネイトスイッチを使えば解決する場合もありますが、よく採用されるモーメンタリスイッチでは、一工夫する必要があります。
そんな回路を「オルタネイト回路」と呼びます。
今回もさっそく完成形を掲載しましょう。
完成形の実例
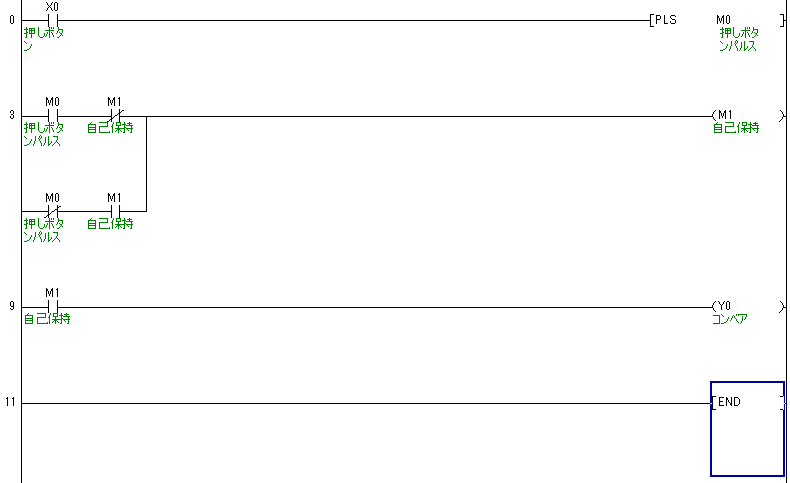
オルタネイト回路の実現にはいくつかの実装方法がありますが、パルス命令が使えるCPUやソフトの場合、これが一番シンプルです。
- スイッチ(X0)を押すと反応する1パルス命令で、自己保持用リレー(M1)をONにする
- 自己保持リレー(M1)がONの時にスイッチを押すと、自己保持を切る
こうすることで、モーメンタリスイッチ1つで、押すたびにON/OFFを繰り返す回路の完成です。
あとは自己保持リレーM1をトリガーに、コンベアやランプ等の出力をONにすればOKです。
みんなで良いラダーを書いて、ラダーマスターになろう!
PLCを制御するための「ラダー言語」の入門講座。
今回は「自己保持回路」の解説をします。
自己保持回路の構造
最初に自己保持回路のテンプレートを載せてしまいます。
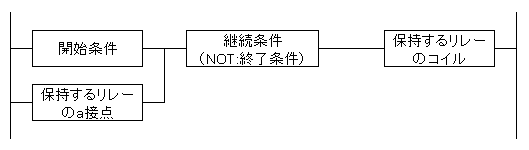
開始条件……自己保持させたい機能を最初に起動させるための回路
継続条件……自己保持を終了させるための論理のNOT回路
保持するリレーのコイル……自己保持させたい機能そのもの
保持するリレーのa接点……このa接点により、自己保持がかかります
完成形の実例
実際に自己保持回路を構築した実例です。
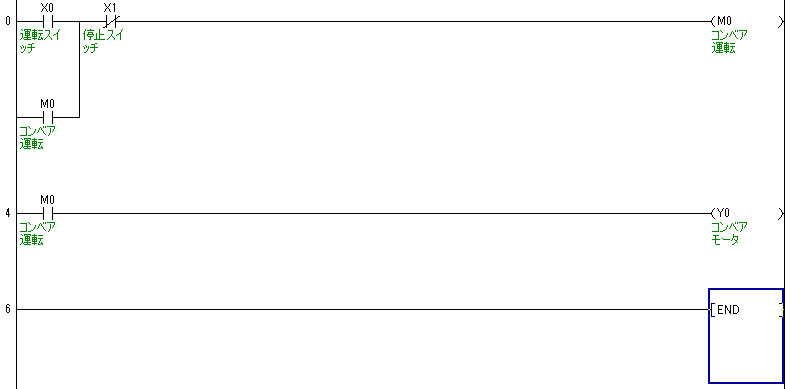
開始条件……手動運転スイッチ(X0)を押す
継続条件……停止スイッチ(X1)が押されるまでは続ける
保持するリレーのコイル……コンベア運転させるリレー
※直接YをONにせず、内部コイルM0を使っているのもミソ。
これについては、後で解説します。
解説
では、順を追って解説していきます。
「スイッチを押したらコンベアを回したい」というのは良くある要望です。
ラダーで書くとしたら、こんな感じでしょうか……。
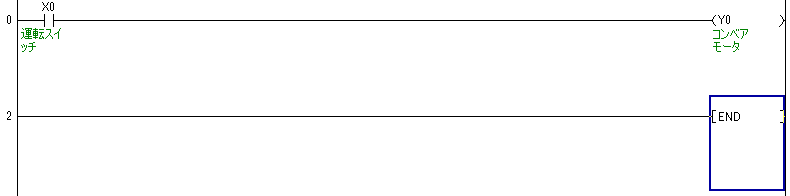
一見うまく動きそうですね。
使っているのがトグルスイッチやオルタネイトスイッチのように、押したら押されっぱなしのスイッチならこれでOKです。
ですが、制御盤に実際に採用されることが多いのはモーメンタリスイッチ(手を離したらOFFになる)でしょう。
モーメンタリスイッチの場合、スイッチを離した瞬間にコンベアも止まってしまいます。
こういう時に「自己保持回路」を使います。
自己保持回路とは、ONさせたいリレーのa接点を自分自身の開始条件にOR回路でつなぐことで、一度ONにしたらONになりっぱなしにできるという回路です。
だし、そのままではいつまでもOFFにならない点に注意です。
自己保持を切るために、継続条件(切断条件とも言う)というものを用います。
停止スイッチやセンサのような、停止させる要因のNOT回路をつなぐことで、自己保持を切ることができます。
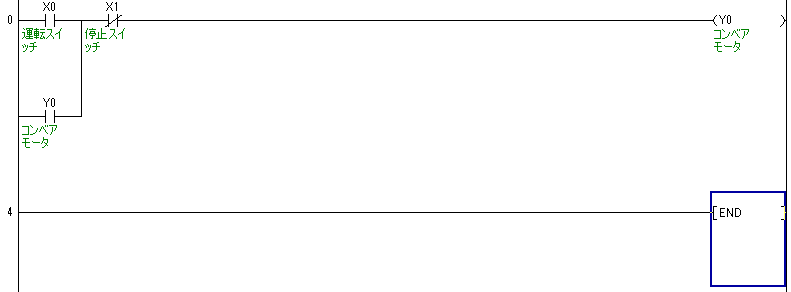
これで基本的にはOKです。
ちょっと応用編
ここでもうワンポイント!
コンベアを回すときに直接Yリレーを制御するのではなく、一旦内部リレーを挟みます。
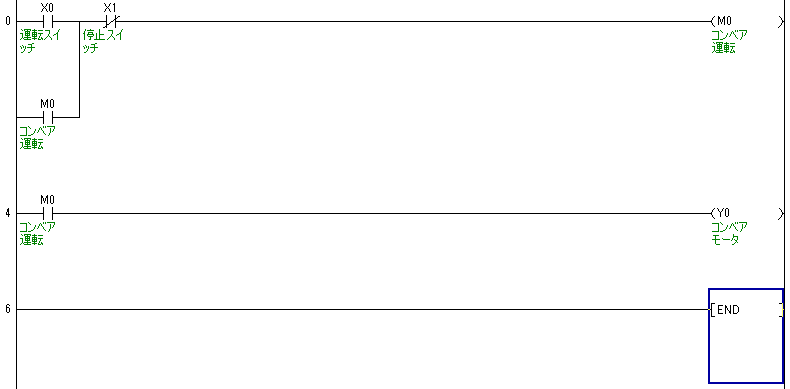
なぜこんなことをするのか?
現実の設備では、こんなシンプルな回路だけで完結することはなかなかありません。
たとえば以下のようなケースが考えられます。
- コンベアを動かしたいタイミングが複数ある(例:自動運転と手動運転)
- Y出力段階で安全回路を組むことで、ロジックと安全回路を分離し、システム安全度を高める(例:開始ロジックがOKでも、人が近くに居たらモータは絶対動かさない)
このように可用性や安全性を考慮しつつ、システム全体の構造をシンプルにすることで、誰が見てもわかりやすいラダーになります。
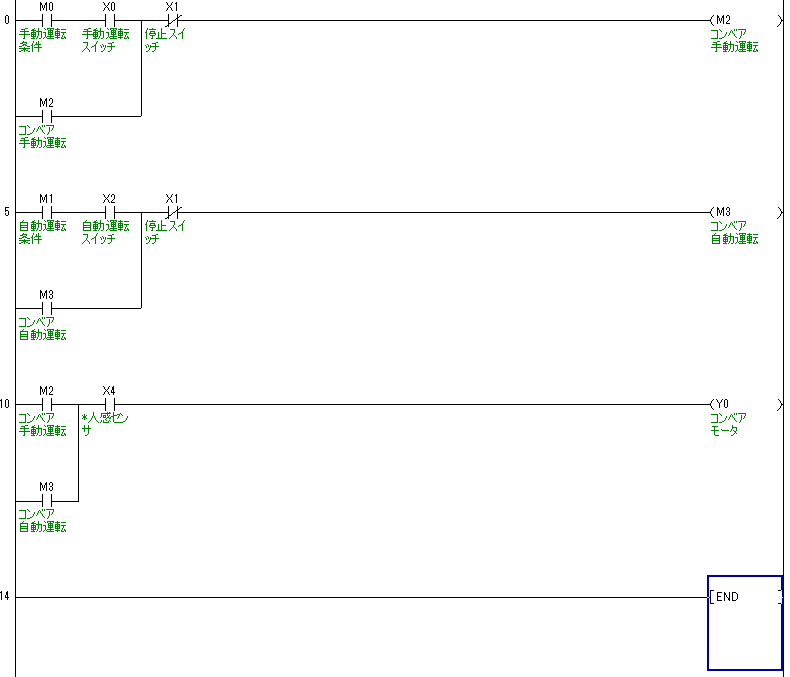
最後に、以下の仕様のラダーの実例図を載せます。
- 手動運転の条件が整っている状態で手動運転スイッチを押すと、コンベアが動く
- 自動運転の条件が整っている状態で自動運転スイッチを押すと、コンベアが動く
- 共通の停止スイッチを押すと、コンベアが止まる
- 人が近くに居ると、コンベアは動き出さない。動いている場合は止まる
以上です。
みんなで良いラダーを書いて、ラダーマスターになろう!